- 1番目の前半のセッションは私のオープンソースによるドローン開発の概要
- 1番目の後半のセッションはhsgucciさんのドローンの仕組み
- 2番めのセッションはmogurisoさんのDronekitによるAndroid APIの概要
- 4番目のセッションの株式会社DRONE.BAR 代表取締役の志賀雄太さんのDronekit Cloudw使ったWebサービス開発
- 5番目のセションはくまだすさんのDronecodeとROSの概要
- 6番目のセッションはhsgucchiさんのLinuxベースのオープンソース フライトコントローラーの概要
3番目のセッションのogochanさんの資料がSlideshareにアップされたのでシェアせててもらいました。順番は前後しましたが、いよいよ最後の資料です。
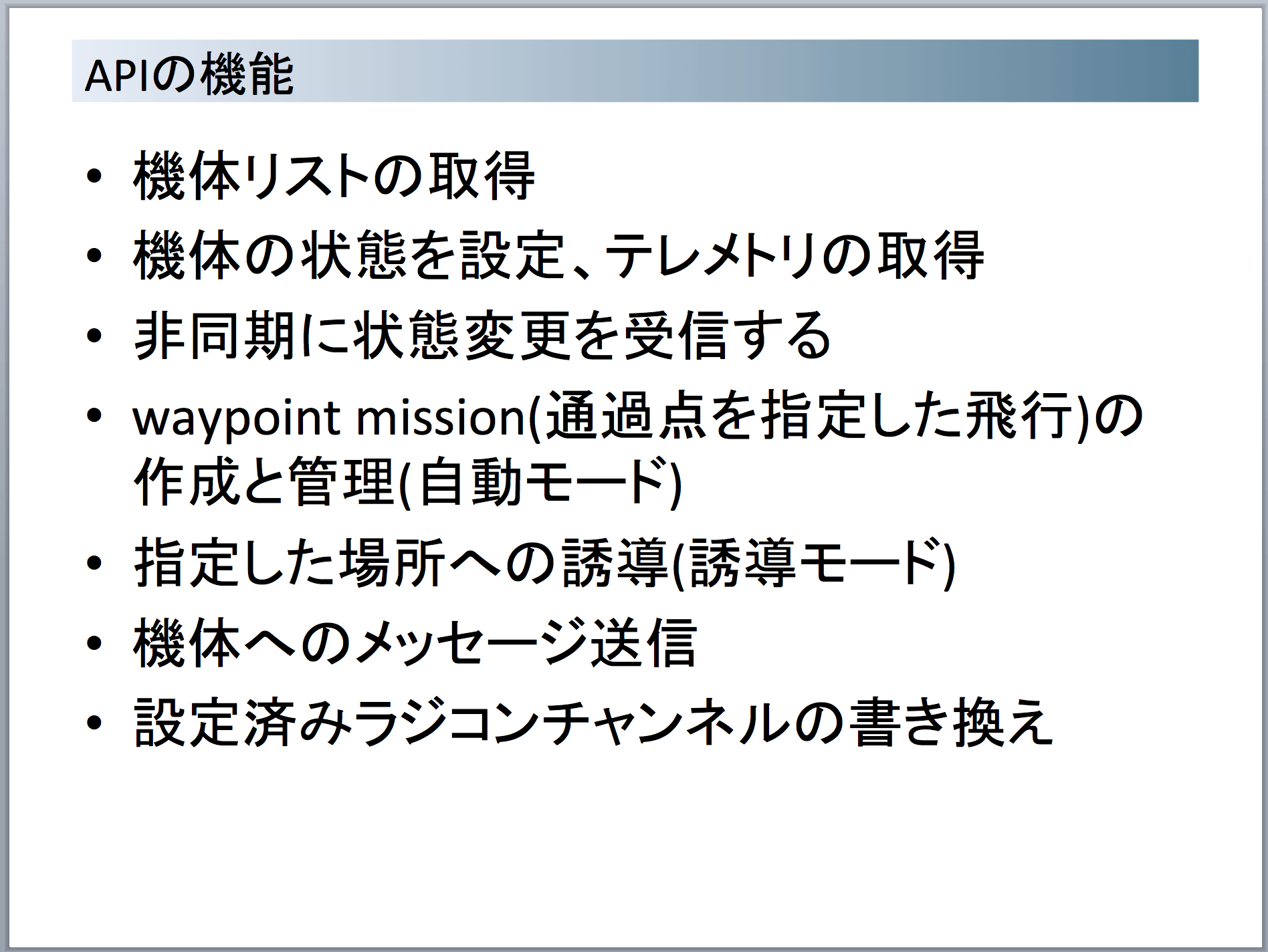
APIとしては、下の図の様に機体の状態を設定したり、テレメトリデータの取得を行ったり、Waypointの管理やWaypointでの自律航法ではなく、Waypointを追加するようなイメージで誘導モードなどの機能があります。
このPython APIはちょっと奥が深そうで、当初はPC用のアプリを作るためのAPIかと思ってたのですが、どうやらそうではなく、機体側に搭載するRaspberry Pi、Edison、Beage Born Blackなどの組み込みLinuxのボードで動くみたいです。
実際に動かして、もう少し検討してみたいと思います。