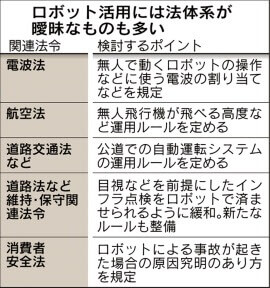
ロボット普及へ法整備 無人機など活用しやすく
[browser-shot url=”http://www.nikkei.com/article/DGXLASFS10H1P_S5A110C1MM8000/” width=”450&# […]
ロボット普及へ法整備 無人機など活用しやすく 続きを読む »
[browser-shot url=”http://www.nikkei.com/article/DGXLASFS10H1P_S5A110C1MM8000/” width=”450&# […]
ロボット普及へ法整備 無人機など活用しやすく 続きを読む »
[browser-shot url=”http://www.nikkei.com/article/DGXLASGM10H7Z_S5A110C1FFB000/” width=”450&#
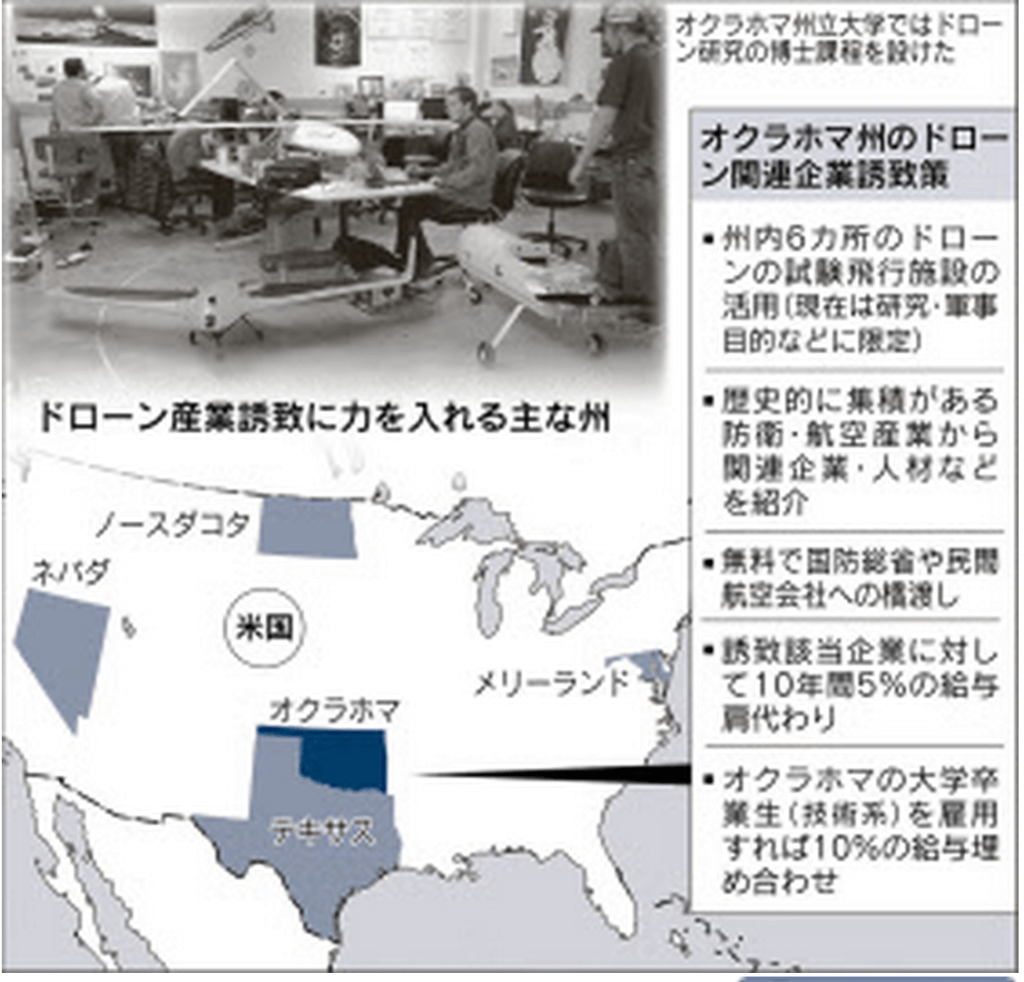
ドローン覇権争い 米が産業化へ先行、追う日中欧 続きを読む »

[browser-shot url=”http://www.robonable.jp/trend/2015/01/0109up-1.html” width=”450″]災害
災害ロボット、開発の継続に向け、平時での用途開拓(下) 続きを読む »
[browser-shot url=”http://monoist.atmarkit.co.jp/mn/articles/1501/09/news020.html” width=”45
従来のGPS受信機を用いたデッドレコニングで最大50mもの位置誤差が出る環境下で、位置精度2.5mを達成 続きを読む »
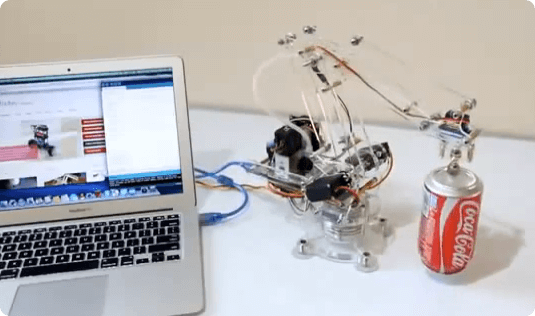
これは良いな〜! レーザーカット・アクリルや木の部分で作られ、標準的なRC hobbyサーボを搭載し、Arduinoの互換ボードによって制御 http://youtu.be/wPI_95J86uA 引用元: uArm|小

ワイヤレス型で複数の産業用ロボットを操作できるティーチペンダント「WiTP(ワイティーピー)」を開発、7月1日に日本と中国で発売すると発表 引用元: ロボットポータル-ロボナブル-ダイヘン、複数の産ロボ操作できるワイヤレ
ロボットポータル-ロボナブル-ダイヘン、複数の産ロボ操作できるワイヤレス型ティーチペンダント 続きを読む »
厚生労働省が公益財団法人テクノエイド協会に委託して実施した「福祉用具・介護ロボット実用化支援事業」の平成25年度の成果を取りまとめ 引用元: – robo_mhlw_140714.pdf.
厚生労働省 「福祉用具・介護ロボ ット実用化支援事業」事業報告書 続きを読む »

マルチコンステレーションのGPS(GPS、GLONASS、ガリレオ、準天頂衛星システム及びSBAS)エンジン、Ublox社のNEO-M8受信機を使用。NEO-M8は1秒未満の時間 – ファーストフィックス(T

スカラロボットには、ACサーボモータが利用されるが、比較的安価なステッピングモータの採用に加え、機能部品を全面的に見直すことで同社従来品の1/2の低価格化を実現 引用元: ロボットポータル-ロボナブル-アイエイアイ、ステ
ロボットポータル-ロボナブル-アイエイアイ、ステップモータ採用の低価格スカラロボ開発 続きを読む »
宇宙航空研究開発機構(JAXA)は7月1日、月の南北極域に、誤差100mという世界初の高精度で軟着陸する宇宙技術を開発することを明らかにした。 引用元: ロボットポータル-ロボナブル-JAXA、探査ロボなどに向け月軟着陸
ロボットポータル-ロボナブル-JAXA、探査ロボなどに向け月軟着陸を高精度化 続きを読む »