MATLABのEmbedded Coderがオープンソースのドローン用フライトコントローラ「Pixhawk」,「 PX4」をサポート
ぶっちゃけこれを見ても私にはさっぱり (^^ゞ
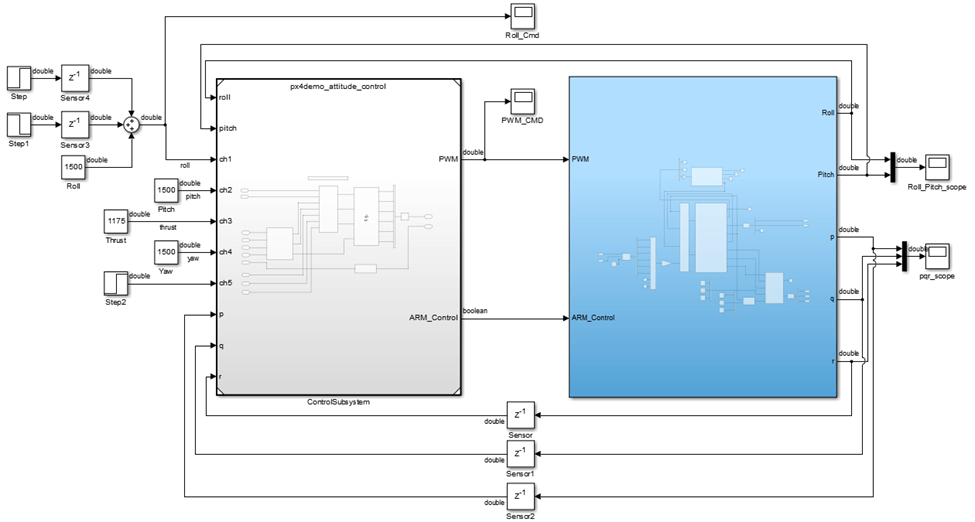
PIXHAWKのソースを見るとMATLABで書かれたソースとEmbedded Coderが吐き出したCのソースが入ってるらと言うことは聞いてた。制御系のアルゴリズムの研究をやっている人にはやはりゼロから色々作るのではなくオープンソースのフライトコントローラを使う事で自分の専門の研究に没頭できるのかな?
主な特徴
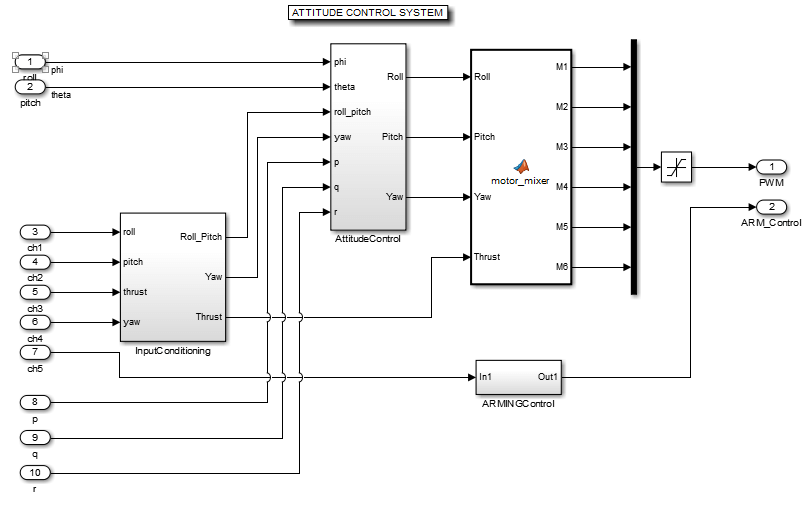
- Simulinkで異なる機体モデルと制御システムの設計をテスト、シミュレーションして、自動的にPX4上にデザインを展開 ・4軸、6軸マルチコプターのための姿勢制御の例が入っている
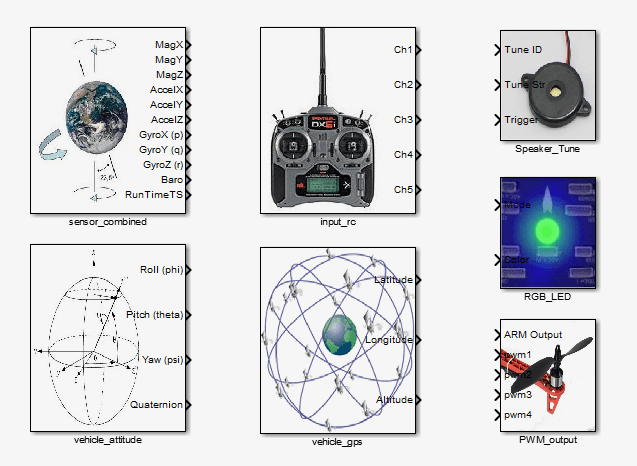
- 慣性計測用のセンサ、周辺ブロックライブラリ、GPS、車両推定、LED、スピーカー、およびPWM出力。これをすることができる他のセンサ/周辺機器をサポートするように拡張可能
- 対話的に生成されたコードの動作をテストすることが可能。リアルタイムで信号およびチューニングパラメータの値を表示する機能
- 飛行中のセンサ、アクチュエータのデータのキャプチャー。
- テストおよび分析のためのあなたのSimulink制御モデルの任意の部分を記録するための機能
- MavlinkあるいはQGroundcontrolの動作中にテレメトリデータをストリーミング
詳しくは下記へ
[Pixhawk PX4 Support from Embedded Coder – Hardware Support]