Raspberry Pi(ラズパイ、RPi)を使用したMAVLinkプロトコルによるドローン用フライトコントローラーPIXHAWK、PX4との通信
Raspberry Piを使ったドローンの応用があったので紹介したいと思います。
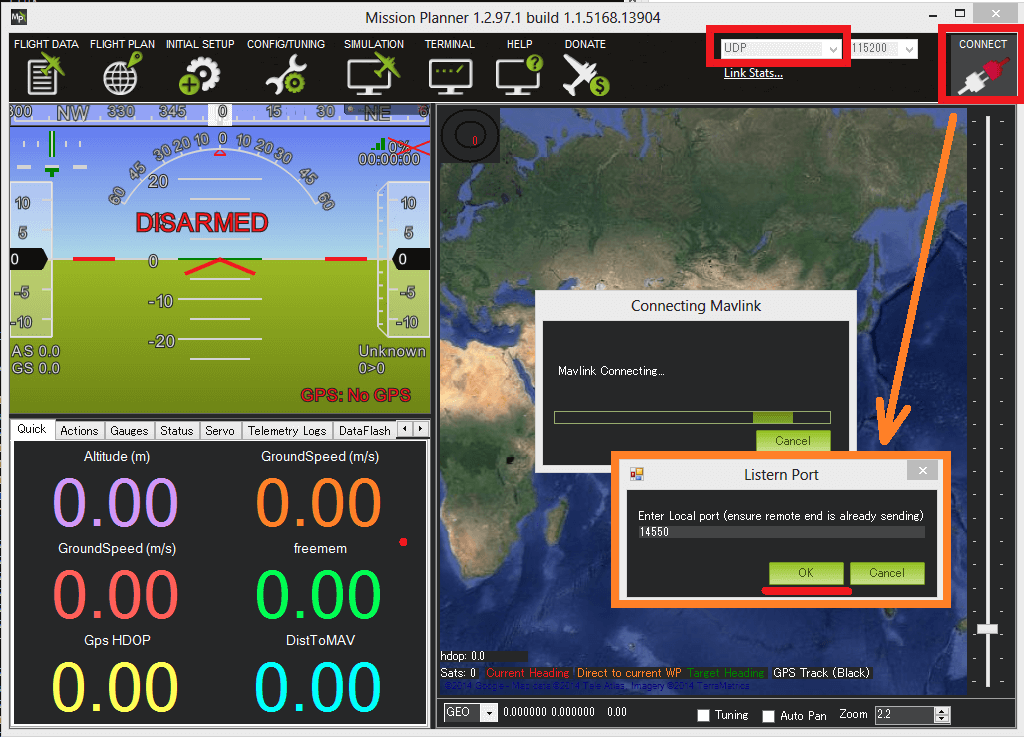
PIXHAWKではMAVLinkプロトコルというのを使用して、グランドステーションソフト(Mission Planner)と通信する仕組みになっています。
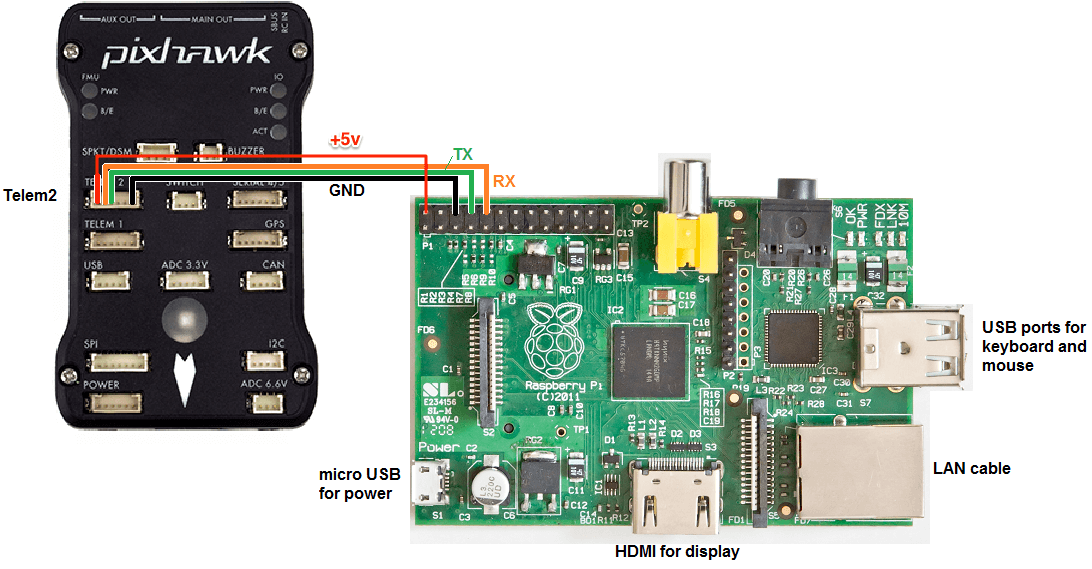
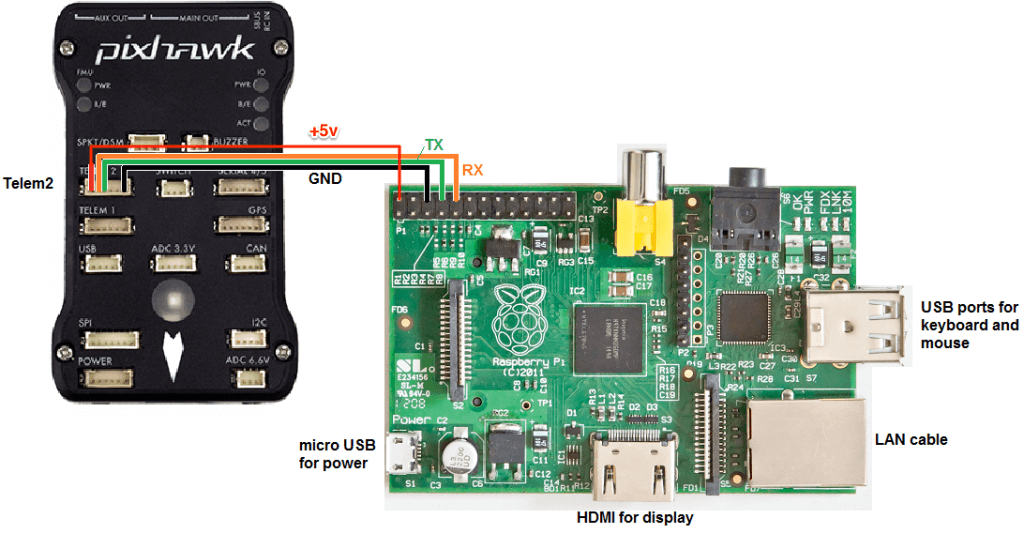
このサイトではシリアル接続を介しMAVLinkプロトコルを使用してフライトコントローラーのPIXHAWKと通信できるように、ラズベリーパイ(RPI)を接続して構成する方法について説明しています。
これによってPIXHAWKの32bitのマイコン(Cortex-M4)では処理しきれなかった画像認識などの追加のタスクをラズパイ側の高性能のSoCで実行することが可能になります。